
Facebook开发出高分辨率触觉传感器,将提高机器人工作效率
Published on:2020-07-13
为了能更好地帮助人类完成手动的工作或任务,机器人必须有效地抓住和操纵周围物体。近年来,虽然机器人研究人员开发了越来越多的技术来达到机器人拾取和处理对象的目标,但大多数方法仅在处理非常基本的任务(例如拾取对象或将其从一个地方移到另一个位置)时才有效。
高分辨率传感器可以通过收集宝贵的触觉信息来启用更高级的机器人操纵功能,这些信息可用于识别并操纵特定对象。现有的许多触觉传感器都是高效的,但生产成本昂贵,这使得它们难以或不可能大规模实施。其他的一些产品价格便宜,但分辨率和性能有限。
考虑到这一点,Facebook的研究人员最近设计了DIGIT,这是一种紧凑,价格适中并且还可以收集高分辨率图像的触觉传感器。在arXiv上预发表的一篇论文中介绍的DIGIT可以促进机器人的开发,该机器人能够完成涉及手部操纵的更多任务。
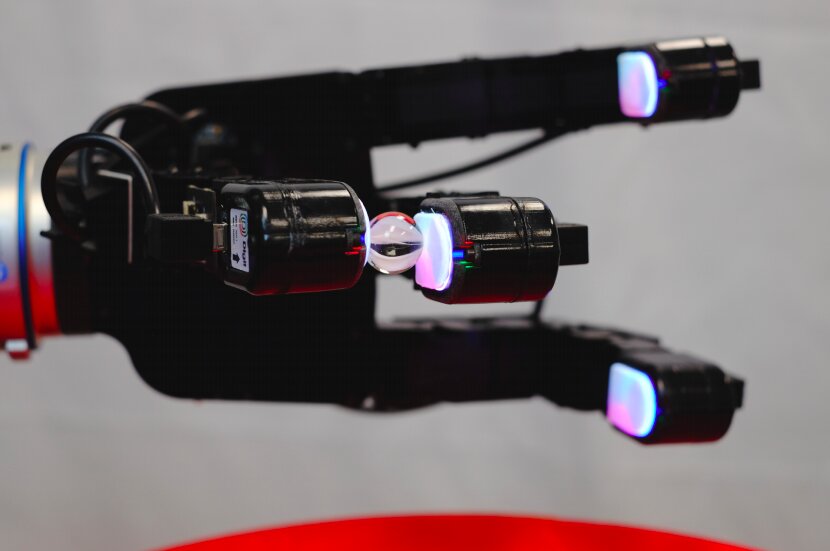
DIGIT传感器安装在Allegro多指手上
研究人员在论文中写道:“限制当前机器人操纵系统的因素之一是难以精确感应接触力。” “关于接触力的传感和推理对于准确控制与环境的交互至关重要。作为实现更好的机器人操纵的一步,我们推出了DIGIT,这是一种成本低、紧凑且高分辨率的触觉传感器,适合于手部操纵。”
这个由Facebook研究人员团队开发的传感器从过去开发的传感技术中汲取了灵感。最新研发的传感器已小型化,因此可以安装更多在机械手上。
DIGIT是独特且相对简单的设计,使它更容易在较短的时间内大规模生产。因此,该传感器比其他能够和它媲美分辨率的捕捉图像解决方案更实惠。
为了评估DIGIT的性能,研究人员在Allegro手上的每个手指上应用了一个传感器,这是Simlab开发的多指机器人手,通常用于测试对象操纵的计算技术。在他们的实验中,他们训练了一个基于深度神经网络的模型来充当Allegro手的控制器,从而使其能够操纵玻璃弹珠。该模型是使用DIGIT传感器收集的数据进行训练的。
在这些测试中,传感器表现出色,收集了高分辨率的触觉数据,这些数据可用于训练深度神经网络,从而在操作任务期间将Allegro手引导到所需位置。在未来的工作中,研究人员计划继续研究他们的传感器,进一步缩小其外形尺寸,并实现弯曲的全向感应场。同时,DIGIT传感器可以在各种人形机器人上进行集成和测试,从而潜在的增强了它们的手动操作能力。
Previous:康复机器人市场迎来怎样的新机遇?
