
国际顶刊发布“手掌可动”柔性夹爪可抓取几十种形态物品,重量可达3kg!
Published on:2020-07-08
末端执行器是机器人机械臂中很重要的一个部位,所以针对它的研究,研究人员开发出很多课题,近期有刊登在国际机器人顶级期刊《国际机器人研究杂志》的一项研究,来自于佛罗里达大学、新加坡科技设计大学、哥伦比亚大学的研究者们共同提出一款新设计的手掌可动的柔性夹爪(soft gripper with active palm)。该夹爪的设计亮点是手掌的可动控制(鲜有研究者将夹爪的手掌设计为可动夹爪)。

研究者在论文中指出,借助于可动的手掌,仅用开环的抓取控制,柔性夹爪可以抓取几十种形态大小各异的物品。最大可抓取的物品重量可达3kg。同时,该柔性夹爪有着很好的抓取稳定性,当机械臂以15m/s^2的加速度移动时,物体仍然牢牢的被抓着保持不掉落。
手掌可动柔性夹爪展现强大抓取能力
想让机器人真正的走入我们的生活中服务大众,优异可靠的抓取能力显然是很重要的。抓取,一个看似简单的,人人都会的动作,对于机器人来说可是一件麻烦事儿。机器人夹爪可以说是机械臂必不可少的一个关键部件,它好比人手一样,作为机械臂的末端执行器,夹爪直接的与机器人的周围环境相互接触,执行抓取,转移,操作物品的任务。有效的,功能强大的夹爪可以提升机器人的抓取性能和操作物品的能力。比较流行的,也相对较实用的夹爪就是二指和三指夹爪了,它们结构简单,抓取可靠。相对来说,五指仿人机械手虽然灵活,高度仿生,但是毋庸置疑,过多的自由度也让抓取的运动规划变得尤为困难。

常见的几种机械手:Festo鱼骨仿生夹爪、SRT北京软体机器人圆周可调安装夹爪
为了提高机械手的抓取性能,大多数研究者都着眼于如何设计更好更灵活的手指,然而有些研究者另辟蹊径,从其他方面寻求答案,比如让“手掌”这一大家忽视掉的部位变得可动。今天向大家介绍一款由科学家新研发的柔性夹爪。来自于佛罗里达大学,新加坡科技设计大学,哥伦比亚大学的研究者们共同提出了一款新设计的手掌可动的柔性夹爪(soft gripper with active palm),并且撰文刊登在国际机器人顶级期刊《国际机器人研究杂志》(The InternationalJournal of Robotic Research)上。该夹爪的设计亮点就是手掌的可动控制。
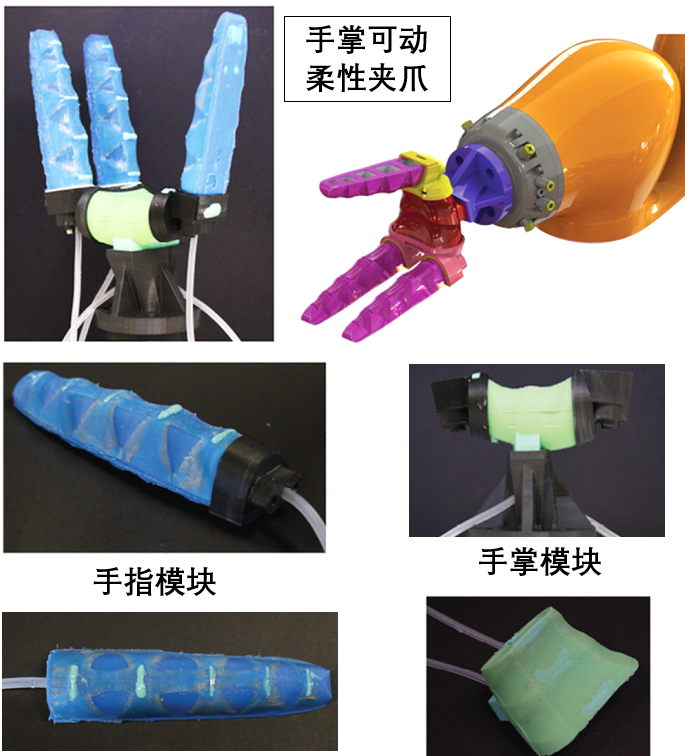
手掌可动柔性夹爪
如果赋予一款普通的柔性夹爪可动手掌,相当于为夹爪增加了一个额外的抓取的自由度。可动手掌可以有效地扩大夹爪的抓取范围,具体来说,在抓取微小物体时,时激活手掌可以缩小手指之间的间隙,从而实现抓取,在抓取大物体时,激活手掌,可以增加抓取力度,让抓取变得更稳定,嗯,不得不说这个想法真的是赞呀!

可动手掌扩大了夹爪的抓取范围
如图所示,研究者设计了一款3指的柔性夹爪,手指和手掌都靠真空驱动,和正压驱动相比,真空驱动的柔性夹爪具有安全,可靠,对材料损耗较低,寿命较长的特点。研究者在论文中指出,借助于可动的手掌,仅仅用开环的抓取控制,柔性夹爪对形状,大小,重量各异的物体有着绝佳的兼容(compliance)能力,它可以抓取几十种不同的物品。最大可抓取的物品重量可达3kg。同时,该柔性夹爪有着很好的抓取稳定性。
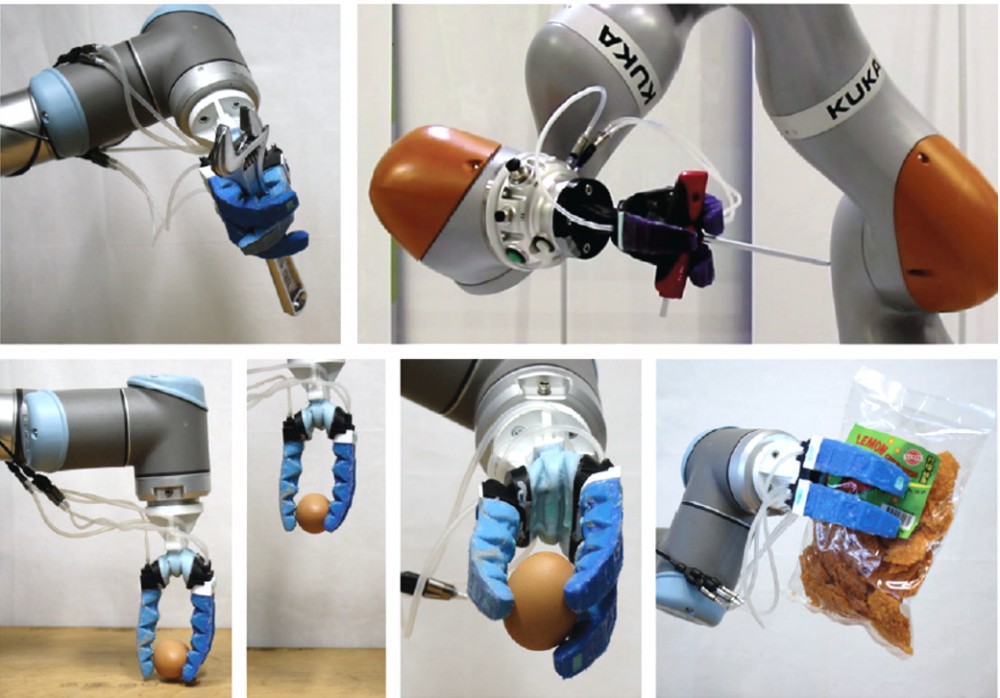
据作者在论文中介绍,向其他柔性夹爪一样,该柔性夹爪可以抓取一些比较脆弱和易碎的物品,例如鸡蛋,袋装薯片,还有高脚杯等,同时借助于可动手掌结构,它也可以抓取很重的物品例如大的扳手和2L的苏打水等(这点绝大多数柔性夹爪都很难做到)。大家先欣赏一下这款柔性夹爪的抓取性能(文末附有完整视频)。在下一部分,会详细介绍这款柔性夹爪的设计以及一些性能测试。论文的基本信息也附在文末。

抓取面包
抓取大包咖啡

抓取酒杯
抓取鸡蛋
在论文中,研究者展示他们设计的柔性夹爪可以抓取20多种形态各异的物品,从细小的圆珠笔,到扁平的光碟,以及鸡蛋,水果,还有其他一些生活常见日用品,例如酒杯,水瓶等。基本上,只有你想不到的,没有它不能抓的(略微夸张了)。
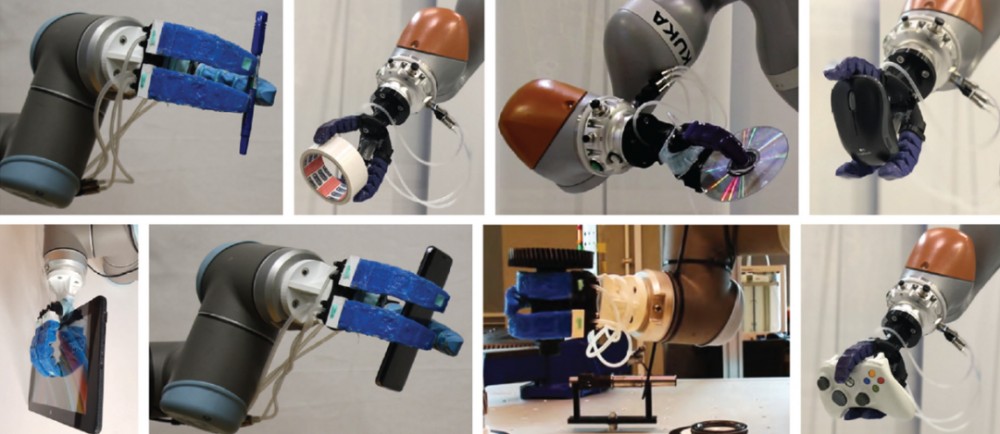
抓取多样性展示1

抓取多样性展示2
这款柔性夹爪不仅仅可以兼容抓取很多不同的物品,在抓取重复性,精确性,和抓取稳定性方面也毫不逊色于硬夹爪。下面两幅动态图展示了柔性夹爪的重复性和稳定性测试。当机械臂以15m/s^2的加速度移动时,物体仍然牢牢的被抓着保持不掉落。

抓取重复性测试
抓取稳定性测试
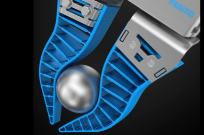
柔性手指由真空驱动,研究者设计柔性手指时,采用了分关节的结构设计。在手指内部,有着5个楔形块充当关节,材料为较硬的软胶。楔形块包裹在一个软而薄的,几乎没什么弹性的气密性薄膜内部,保证了手指不可以伸长,但是不影响手指的弯曲形变。当逐渐抽取手指内部的空气时,手指便会弯曲变形。
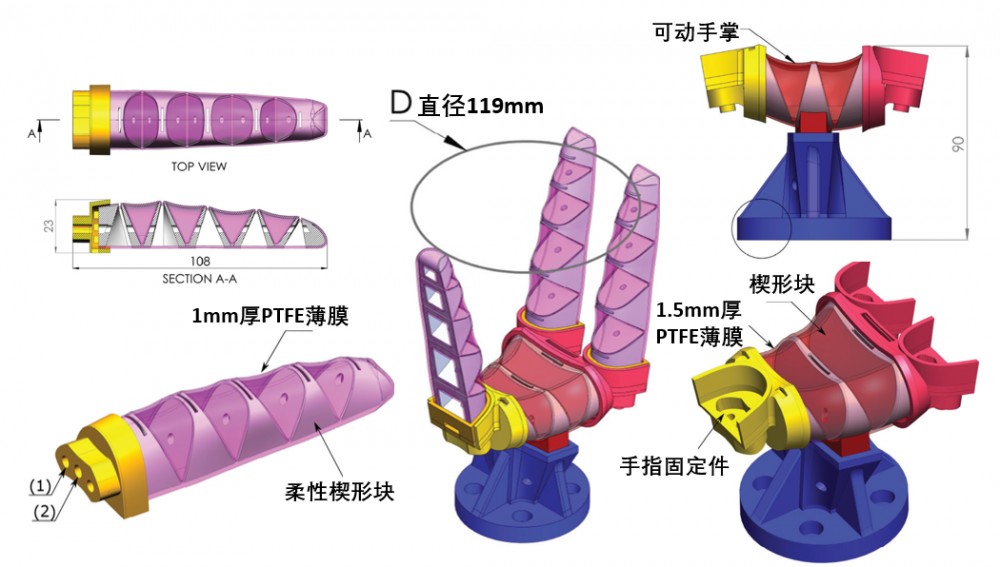
柔性夹爪设计三维图
手掌的设计类似于手指,也是由内部的楔形快和外部的弹性薄膜组成。手掌的楔形块有3个,在对手掌进行抽真空时,楔形块会靠近彼此,从而手掌产生变形。手掌和手指的加工方式类似,先是注模外部的柔性薄膜,然后注模内部的楔形块,最后将它们装配,密封即可。
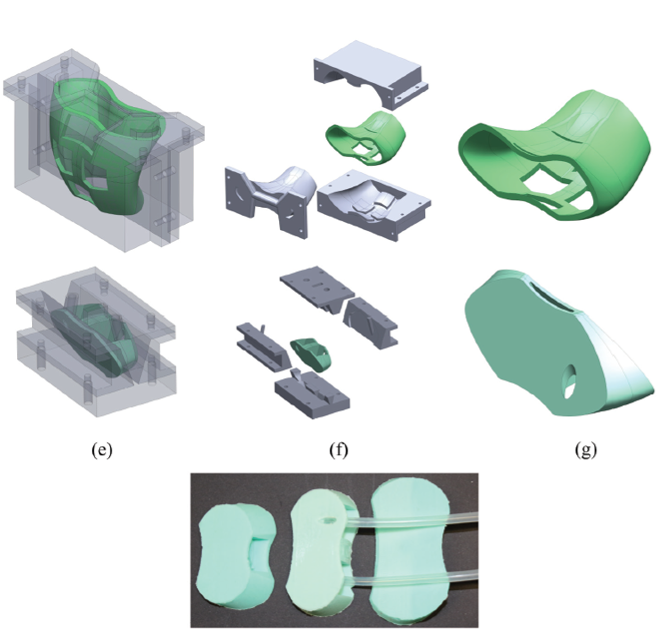
手掌的注模过程
通过试验结果可以明显看出,手掌在激活和未激活状态下,柔性夹爪有效地抓取范围变化是非常大的。这也从一定程度上证明了手掌可动这一简单结构对于抓取能力的提升十分的帮助。

手掌可动抓取和手掌静止抓取展示
研究者对于柔性手指的载荷进行测试,利用不同的材料做柔性薄膜。在相同的负压下(-98.3kpa)进行拉力测试。根据实验结果,研究者最终选取了一种名为MoldStar30的材质作为手指包覆薄膜的材料。
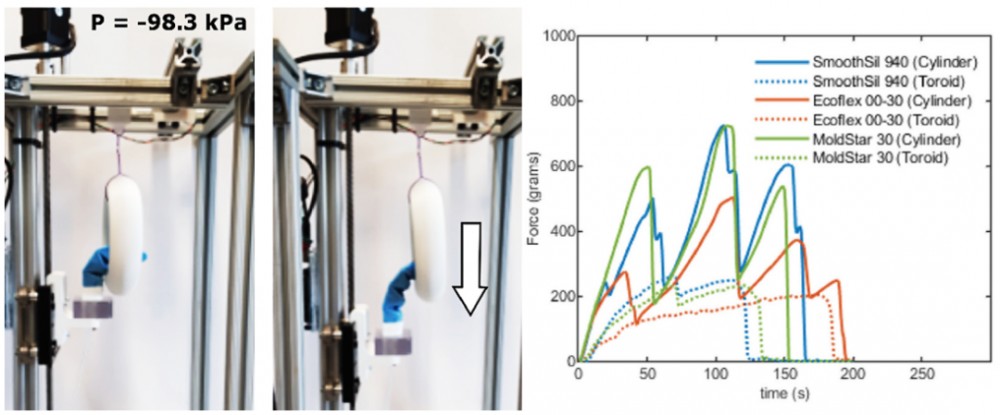
手指拉力测试
为了更好的表征可动手掌结构的抓取效果,研究者进行了抓取负载测试。具体测试方法为,令柔性夹爪抓取圆柱形物体,然后分别从两个方向(沿着手指方向和垂直于手指方向)对物体进行拉出试验,所需要的拉力越大,抓取效果越好,越稳定。可以看出,在手掌可动时,夹爪的抓取力要比不可动手掌高出很多,最大差距可以去到15N左右(图中力的单位是grams)。即手掌可动夹爪的抓取能力要比普通柔性夹爪的抓取能力高达1倍还多一些。
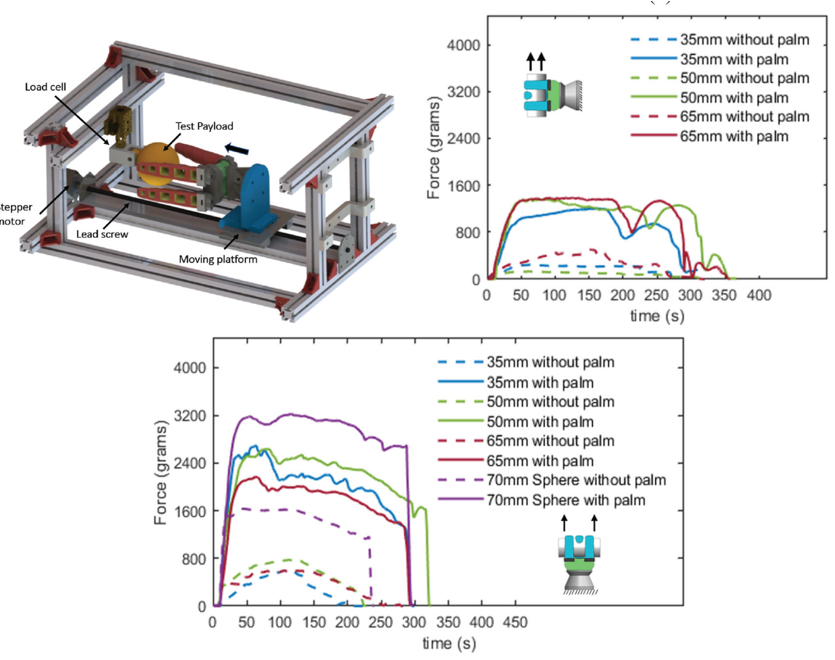
抓取力测试
对于机械夹爪来说,负载能力和抓取适应性时很重要的指标,对于当前的大部分柔性夹爪来说,二者难以兼得。另外,快速的实现稳定的抓取,对于柔性夹爪来说也是一个很大的挑战。今天介绍的这款利用真空驱动,手掌可动的柔性夹爪很好的兼顾了以上几个方面的问题,实现了大负载和兼容性并存的抓取效果,同时,这款夹爪也可以实现稳定而可靠的抓取,对于柔性夹爪在实际应用中的发展有着很重要的意义。
研究者指出,他们设计的柔性夹爪可以很方便的安装到机械臂上,例如KUKA,UR10等。仅仅通过开环控制就实现了抓取不同形状,硬度,和重量的物体。在未来的研究中,研究者希望加入闭环控制,能够测量手指和手掌的形变和接触应力,从而实现更稳定可靠的抓取。
Previous:内幕: 32台机器人构成的索尼自动化工厂
Next:采样机器人可让临床医生与感染患者保持距离
