
研究人员训练四足机器人平衡木
Published on:2020-07-06
尽管四足机器人可以实现令人赞叹的壮举,例如拉飞机或爬栅栏,但它们仍然有一些局限性。在大多数情况下,它们需要较大的表面才能行走。意大利的一组机器人研究人员正在寻求改变这一现状。他们创建了一个机器人控制器,该控制器可以使四足机器人跨过细光束。
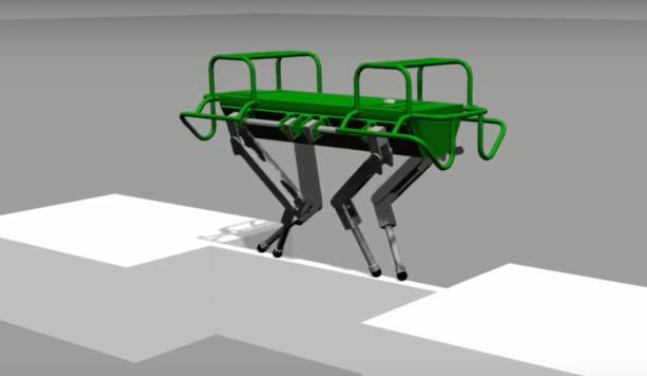
四足机器人只能平衡两条腿,并可以脚跟走路。在数字仿真中,该控制器允许一个90公斤重的机器人跨过仅6厘米宽的桥梁。意大利技术研究所(IIT)的研究人员演示了配备有控制器的机器人如何即使在被推拉时也能保持两只脚的平衡。当机器人调整到不同的高度时,它甚至可以在两条腿上保持平衡。IIT小组在arXiv上的一篇论文中详细介绍了他们的发现。
在美国,波士顿动力公司的Spot可以说是最受欢迎的四足机器人,但是随着研究人员开发诸如IIT的机器人控制器,我们可能会看到更多的四足机器人应用。
Previous:深耕高端智能装备,利元亨加码高精密激光加工
