
折纸欠驱动三指机械手,可有效抓取30多种各异物体
Published on:2020-07-01
由于折纸的艺术灵活性,科学家们总能从中获得很多启发,创建出很多不同组合结构的机器人。折纸机器人已经发展成为了一个独特的研究方向。
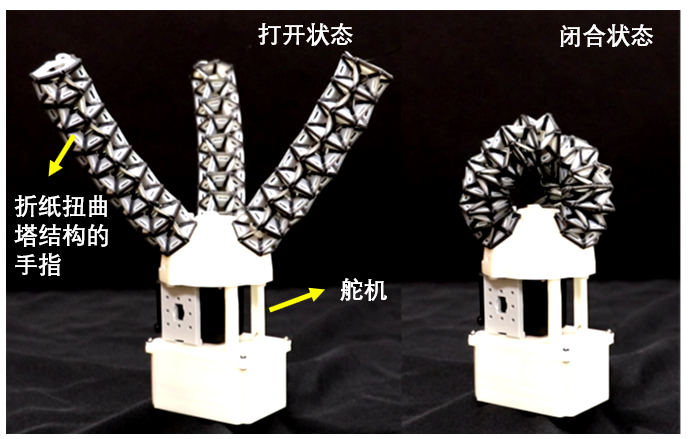
近期刊登于国际顶级机器人期刊《IEEE机器人学报(Transactions on Robotics)》的一篇文章介绍了一款受到“折纸扭转塔(Origami Twisted Tower)”结构启发的欠驱动三指机械手,只需要一个舵机的控制,该机械手就可以实现复杂的三维空间变形抓握,并且有效抓取30多种形态各异的物体。
这款机械手被证明可以有效地降低传感器的精度需求,简化抓取物体时对于抓取算法的要求。该项研究由凯斯西储大学(Case Western Reserve University),约翰霍普金斯大学(Johns Hopkins University,)以及德克萨斯州农工大学(Texas A&M University)的研究者提出并完成。
折纸扭转塔结构启发的欠驱动机械手
折纸是依靠对纸张的折叠而让其呈现各种形状和花样的艺术。据考证,其起源可以追溯到中国宋朝,并在日本得到广泛的发展。不需要额外的裁剪和粘贴,折纸高手就能够折叠出非常复杂的三维结构。折纸艺术能够把2维的结构转换为复杂的3维结构,科学家们早已将折纸技术应用于各个领域,其中一个非常典型的例子就是太空飞船上的折纸结构的太阳能电池板。
折纸结构的太阳能板
基于折纸技术,机器人学家们也开创了一个全新的机器人设计研究方向:折纸机器人(origami robot),这类机器人和传统结构的机器人(由连杆等机械结构构成)由很大差异,它们具有结构轻巧,加工制造简单,以及可以进行复杂变形等特点,颇受机器人设计者的钟爱。
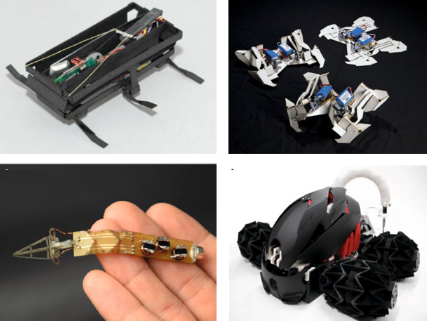
典型的折纸机器人
今天介绍的是基于一种特殊的折纸方法,折纸扭转塔(origami twisted tower)设计的三指欠驱动机械手。折纸扭转塔,顾名思义,是像塔一样的多层折纸结构,当扭转每一层的时候,整个结构会沿着塔身收缩, 这种由复杂的三维空间变形(扭转收缩)的机理非常适用于欠驱动设计。
研究者称他们设计的机械手为扭转之手(Twister Hand)。这款机械手仅有一个电机驱动拉线驱动,可以用来抓取不同形状,重量,尺寸以及纹理的物体。每一只手指由一个柔顺连续的折纸结构启发而设计。研究者设计了手指的三维CAD模型,并且用3d打印的方式以一体制造。机械手是拉线欠驱动(underactuated,欠驱动指的是结构输入端的自由度小于输出端的自由度,即用简单的输入实现了更多自由度的输出)的,每根手指有一根线,三根线汇聚到舵机的轮盘处进行驱动(拉线,放线),拉动线就可以驱动手指产生扭转收缩的复杂形变。研究者通过实验发现,仅仅用无需传感器的开环抓取控制就可以实现30多种形态各异的物体的抓取。
该项研究由凯斯西储大学(Case Western Reserve University),约翰霍普金斯大学(Johns Hopkins University,)以及德克萨斯州农工大学(TexasA&M University)的研究者提出并完成。我们先来看一些精彩的抓取展示,在下一部分为大家详细解读这款折纸启发的欠驱动机械手的设计理念。
抓取电线卷
抓取鸡蛋
抓取手帕
抓取变形的魔方

抓取薯条盒
研究者提出的扭转手结构有一下特点:1. 具有连续变化的特性,弯曲,扭转和收缩的运动可以通过结构的设计同时实现。2. 具有柔顺的特性,折纸结构自身具有柔顺特性,另外通过特定的材料选择使用也可以让结构具有进一步的柔顺性。3. 可被重构性,可以被用于设计各种不同的机器人结构。4. 尺寸可调整性,同样的结构可大可小,功能不变。
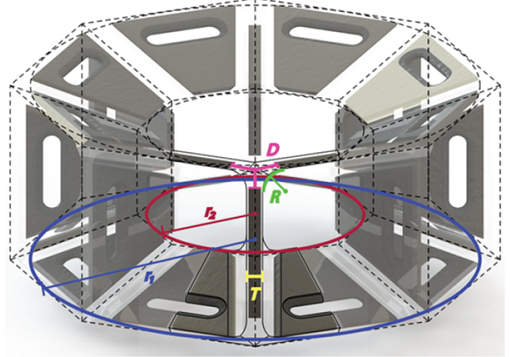
折纸扭转塔结构可以用任意边数大于3的多边形来构造,在这里研究者展示了两种多边形,分别是六边形和八边形。假设我们固定下端的多边形,那么当扭转上层的多边形时,中间的支撑结构就会向一侧倾斜,整个上层结构就会向下层靠近。
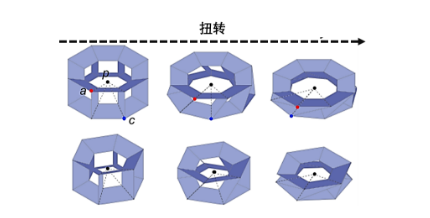
折纸扭转塔结构
研究者希望能够用3d打印的方法一体成型这种折纸扭转塔结构,因此设计了两种CAD模型,并且打印出来验证它们的可行性。左边的是利用了不同组元的结构设计,它的结构较为复杂,硬体结构和柔性结构式独立的,只是在连接处相连。右边的结构是采用了不同的设计方式,将硬体结构完全的嵌入到了柔性结构当中。
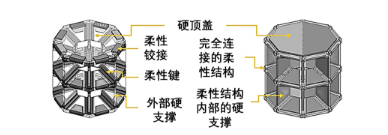
两种不同的CAD模型
测试模型由Stratasys公司的Objet350 Connex3 打印机打印,软材料采用了TangoPlus,硬材料则采用了VeroWhite。通过实验测试得知,虽然软硬结构分开的设计可以实现这折纸扭转塔的变形,但是它非常的不耐用,如果重复扭转几次的话,在连接处会出现非常明显的裂纹。而硬体内嵌软结构式的设计则更为耐用,因为这种设计避免了由硬结构到软结构突然的转变。因此最终研究者采用这种硬结构内嵌到软材料当中的设计。
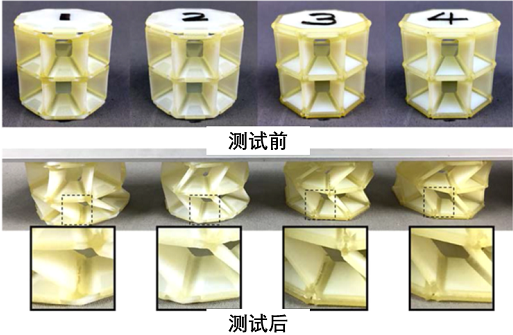
不同的CAD模型3d打印件测试
最终采用的设计方——硬材料内嵌于软材料之中
研究者最终采用了六边形和10层扭转塔的结构来设计每一个手指。每根手指都采用了硬材料内嵌到软材料中的设计方法打印。手指的重量仅仅有13g。完全伸展的整个长度大约129.95mm,收缩后长度为32mm,大约有4倍的变形效果。将一根线穿过每一层结构,拉动线就可以驱动手指产生扭转收缩的复杂形变。研究者提出了两种走线方式,螺旋型走线和折线形走线。在本设计中,采用了折线形走线的驱动方式。
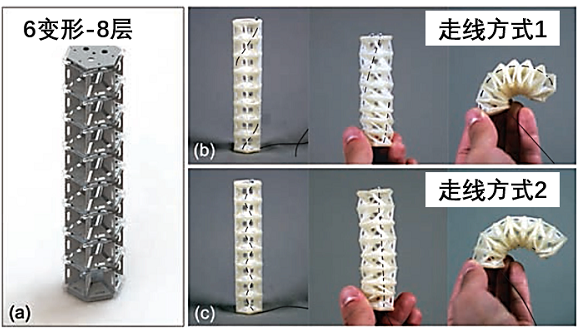
折纸扭转塔手指设计
当把三根手指装配到仅有一个舵机的底座上,便得到了一个TWISTER Hand扭转之手。它结构紧凑,用一个舵机就可以控制机械手的开合,整个手的重量大约仅有280g。
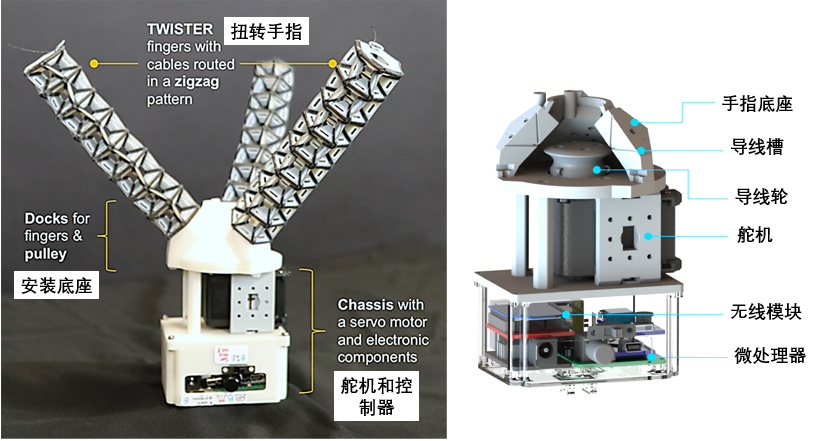
机械手结构设计
这款机械手展示了优异的抓取特性,可以抓取日常生活中的很多物体,比如橙子,塑料杯,以及一袋巧克力豆。这都归功于折纸结构的手指复杂的变形和结构柔顺的特性,让机械手有了绝佳的适应性。
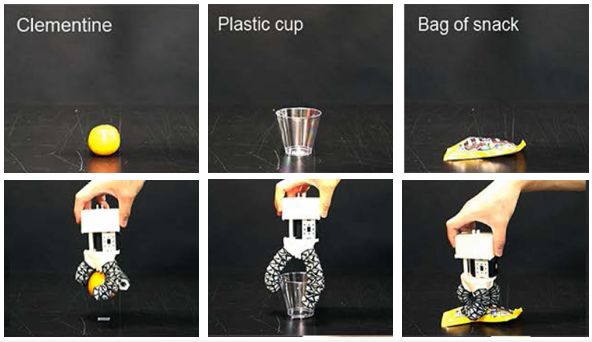
抓取展示,橙子,塑料杯,巧克力小吃
事实上,研究者一共测试了近36种物体,它们有不同的形状,尺寸,重量还有纹理。抓取成功的标准是每一件物体抓取10s钟不掉落。除去铅笔,香蕉没有成功抓取外,其余物体都被成功抓取(注意是开环控制),向我们证明了这款欠驱动机械手强大的抓取能力。

用于抓取测试的36种物体,全部成功抓取
研究者还进行了一项非常有趣并且实用的测试,就是机械手在以不同的角度接近被抓去物体时,抓取的成功率。
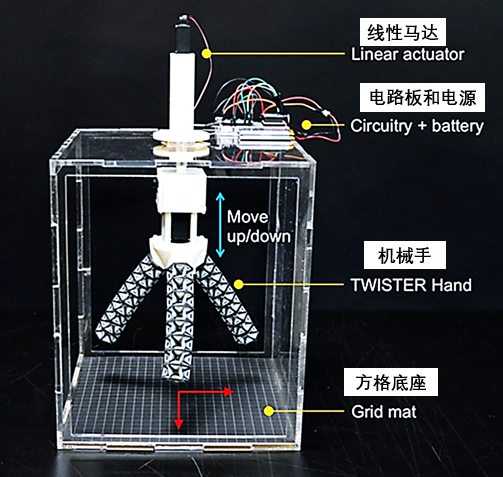
抓取测试平台-不同角度的抓取方向
可以看到,在研究者给出的三种抓取方向种,0度,30度和60度来说,100%抓取成功区域(绿色区域)的面积分别为86,81以及85平方厘米。67%抓取成功率(红色区域内)的面积为93,88和86平方厘米。
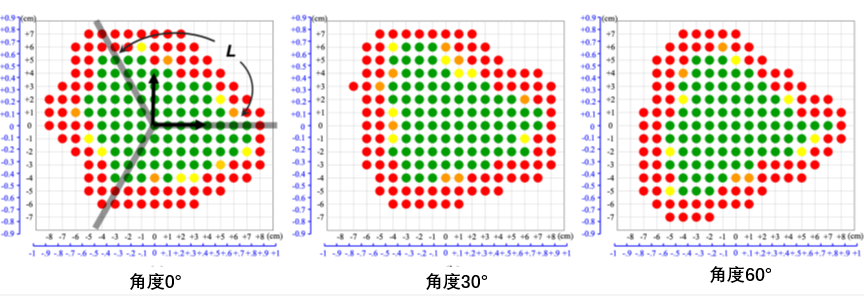
不同抓取角度下有效抓取面积
和传统机器人相比,柔性的欠驱动机器人有着很大的应用潜力,例如只用很简单的控制和传感就可以实现和环境或者人类的柔顺交互。今天小编介绍的这项研究就是利用折纸结构来设计柔性的欠驱动机械手。这种机械手可以有效地降低传感器的精度需求,简化抓取物体时对于抓取算法的要求。同时这种结构可以通过设计被做成不同的尺寸,不同的结构,从而被应用到更多的场景中去。
高级的算法和控制对于机器人的应用固然重要,但算法和传感器总归有失效或者是出错的时候。如果能够通过机械设计来实现一些巧妙地结构,让机器人具有自体的柔顺行,从而降低整个机器人对于传感器和控制算法的依赖性,这是一个值得大家注意的发展方向。
Previous: 维星医疗科技与钛米机器人达成合作,共建AI医疗体系
